

 O așteptăm de mult timp, iar acum este implementată pe scară largă: inteligența artificială (AI). De la fabricile automate, mașinile și camioanele care se conduc singure și până la șoferii roboți, vedem cum AI va face mașinile automate mai eficiente, mai profitabile și ne va îmbunătăți viața. Și, în centrul acestor mașini automate și automobile se află abilitatea lor de a măsura cu precizie poziția și mișcarea.
O așteptăm de mult timp, iar acum este implementată pe scară largă: inteligența artificială (AI). De la fabricile automate, mașinile și camioanele care se conduc singure și până la șoferii roboți, vedem cum AI va face mașinile automate mai eficiente, mai profitabile și ne va îmbunătăți viața. Și, în centrul acestor mașini automate și automobile se află abilitatea lor de a măsura cu precizie poziția și mișcarea.
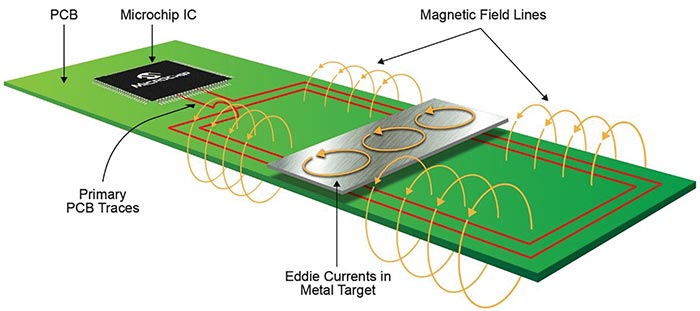
Figura 1: Exemplu de senzor de poziție inductiv. (© Microchip Technology) ▶
Există multe modalități de măsurare a poziției, dar o tehnologie în creștere rapidă este senzorul de poziție inductiv. Precizia, imunitatea la zgomot și rentabilitatea sunt câteva dintre avantajele acestei tehnologii. Mai jos, sunt eliminate unele concepții greșite despre senzorii de poziție inductivi, alături de o comparație cu alte tehnologii de senzori, cum ar fi senzorii cu efect Hall și senzorii magnetorezistivi.
Mitul # 1: Senzorii inductivi utilizează inductanța pentru a măsura poziția
Eticheta poate fi derutantă, dar adevărul este că senzorii inductivi nu măsoară inductanța. În schimb, aceștia utilizează inducția electromagnetică a unui câmp magnetic într-o țintă metalică, împreună cu proprietățile bine cunoscute ale unui transformator cu miez de aer și legea lui Faraday pentru a localiza cu precizie perturbarea acestui câmp magnetic de către țintă. Poate părea complicat pentru mulți dintre noi, care am uitat tot ce am învățat la școală despre teoria câmpului electromagnetic, dar, pur și simplu, senzorii inductivi măsoară perturbarea unui câmp magnetic de către o țintă conductoare.
În plus, acest câmp magnetic nu este generat de un magnet permanent – care este necesar pentru senzorii cu efect Hall și senzorii magnetorezistivi – ci este generat de înfășurarea primară a unui transformator. Două bobine secundare sunt utilizate pentru a detecta acest câmp magnetic și, la fel ca în cazul unui transformator, folosim legea lui Faraday pentru a converti acest câmp într-o tensiune. O țintă metalică plasată în acest câmp magnetic va induce curenți turbionari care se vor opune câmpului magnetic și vor reduce la zero intensitatea câmpului în dreptul țintei. Fiind plasate în locații fizice diferite, cele două bobine de recepție vor detecta o tensiune diferită. Poziția țintei poate fi calculată prin simpla calculare a raportului dintre aceste două tensiuni ale bobinelor de recepție.
Mitul # 2: Senzorii de poziție inductivi nu sunt preciși
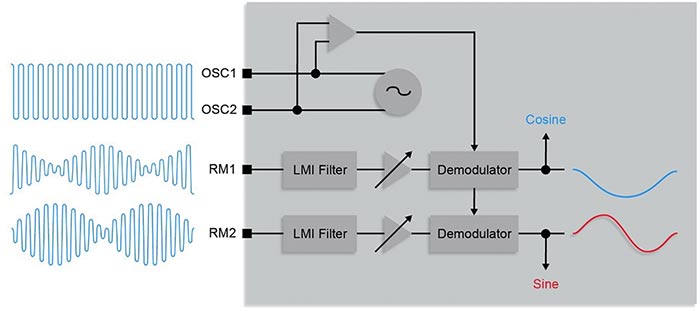
Figura 2: Exemplu de demodulator sincron. (© Microchip Technology)
Acesta este un mit ușor de înlăturat, deoarece senzorii de poziție inductivi sunt foarte preciși, excelând la temperaturi mai ridicate, unde alte sisteme bazate pe magneți au probleme. Marele motiv pentru precizia senzorilor de poziție inductivi este faptul că nu se bazează pe natura neliniară a magnetului permanent. În schimb, ei caută doar perturbația câmpului magnetic autogenerat. Ca urmare, se pot obține erori sub ±0,1 la sută pe întreaga gamă de măsurare la temperatura camerei. Erorile sub ±0,3 procente pot fi obținute în funcție de temperatură și cu variații ale întrefierului dintre țintă și senzor. În plus, algoritmul complet este creat fie pentru a elimina variația de temperatură, fie pentru a minimiza efectul acesteia. De exemplu, senzorul de poziție inductiv va excita câmpul magnetic la o frecvență cuprinsă între 1 și 6 MHz, folosind, însă, un oscilator LC. Ambele mărimi se pot modifica în funcție de temperatură, dar acest lucru nu are niciun impact asupra poziției. Motivul se datorează canalelor secundare de recepție care utilizează demodularea sincronă, aceasta fiind o funcție a oscilatorului primar. Astfel, deviația nu va avea niciun impact asupra amplitudinii semnalelor recepționate. În afară de temperatură, obiectele metalice din apropierea senzorului pot avea un impact asupra câmpului magnetic. Ca urmare, este necesar un anumit nivel de calibrare, dar calibrarea nu se modifică în funcție de temperatură. De exemplu, LX3302A de la Microchip Technology utilizează opt segmente de calibrare. Convertoarele analog-digitale (ADC) pe 13-biți și procesoarele pe 32-biți ajută, de asemenea, la eliminarea erorilor de calcul și de cuantificare care pot apărea, oferind o rezoluție de ieșire de 12 biți pe întreaga gamă de măsurare.
Mitul #3: Senzorii de poziție inductivi sunt scumpi
Nu prea se întâmplă des să obțineți ce e mai bun din cele două lumi – performanță ridicată la un cost rezonabil – dar senzorii inductivi reușesc și aici. În timp ce senzorii cu efect Hall și cei magnetorezistivi necesită ca un magnet permanent să fie fabricat la toleranța și puterea corespunzătoare pentru a obține o precizie decentă, senzorii inductivi au nevoie doar de o bucată de metal ca țintă, ceea ce scutește utilizatorul de costul magnetului. Deși placa de circuit imprimat va trebui să fie mai mare datorită traseelor senzorilor, acest lucru costă, de obicei, mult mai puțin decât costul magnetului. Iar dacă dispuneți de spațiu suplimentar pe PCB, această porțiune nu mai presupune niciun cost. Astfel, senzorul de poziție inductiv este o soluție mai rentabilă decât soluțiile cu efect Hall și cele magnetorezistive, deoarece asigură detectarea câmpului magnetic fără utilizarea unui magnet.
Mitul #4: Senzorii de poziție inductivi sunt sensibili la un câmp magnetic extern
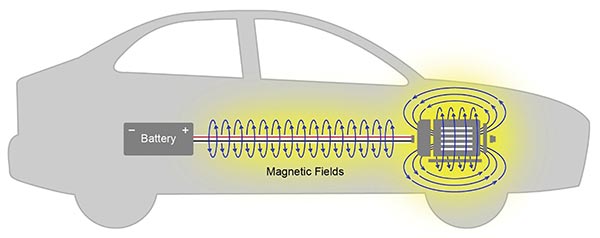
Figura 3: Un motor și un curent ridicat care generează câmpuri magnetice dispersate mari. (© Microchip Technology)
Mașinile automate din ziua de azi creează câmpuri magnetice dispersate mai mult ca niciodată, ceea ce provoacă probleme senzorilor cu efect Hall și magnetorezistivi. Senzorii inductivi de poziție utilizează demodularea activă pentru a respinge aceste câmpuri perturbatoare.
Mașinile electrice din generația următoare pot avea câteva sute de amperi care circulă de la baterii la motorul de tracțiune. În plus, majoritatea mașinilor au mai mult de trei motoare de curent continuu fără perii (BLDC) pentru deplasarea mașinii, servodirecția electronică și motorul de asistență la frânare. Toate aceste sisteme generează câmpuri magnetice perturbatoare. Din cauza creșterii rapide a acestor câmpuri magnetice parazite, noile specificații cer mai multe teste de imunitate la câmpuri magnetice mai mari. În industria automobilelor, componentele electronice ale mașinilor sunt acum supuse la un câmp continuu de 4mT în timpul procesului de calificare EMC, iar citirile false în oricare dintre senzorii critici pentru siguranță – servodirecția, pedala de accelerație, poziția rotorului de tracțiune – nu pot apărea. Avantajul detecției inductive a poziției este imunitatea la aceste perturbații, deoarece filtrează în mod activ doar frecvența de care are nevoie pentru a detecta. Deoarece senzorii de poziție inductivi nu folosesc niciun material magnetic, nu captează niciun câmp magnetic de curent continuu. Cu alte cuvinte, legea lui Faraday este zero pentru un câmp magnetic static. În plus, demodulatorul sincron descris mai sus va filtra alte frecvențe deasupra și dedesubtul frecvenței de excitație primară, în același mod în care puteți selecta un singur post de radio AM atunci când antena captează întreaga bandă AM. Același tip de respingere nu este posibil cu senzorii cu efect Hall și magnetorezistivi.
Mitul #5: Detectarea inductivă a poziției este o tehnologie nouă

Figura 4: LVDT, rezolvere și senzori (© Microchip Technology)
Senzorii de poziție inductivi utilizează un PCB pe post de senzor și o bucată de metal pe post de țintă. Deși aceasta poate fi o modalitate nouă de implementare a detecției, tehnologia este bine stabilită. Transformatorul diferențial liniar variabil (LVDT – Linear Voltage Differential Transformer) este o rudă foarte apropiată a senzorilor de poziție inductivi. LVDT va utiliza o bobină primară și două bobine secundare pentru a detecta poziția unui arbore metalic în aplicațiile robotice. Senzorii de poziție inductivi utilizează în mare parte aceleași tehnici prin reducerea înfășurărilor la doar un PCB. Rezolverele magnetice, versiunea rotativă a LVDT-ului, utilizează, de asemenea, tehnici similare. Încă o dată, în loc de o structură metalică cu aspect de transformator, senzorii de poziție inductivi îndeplinesc aceeași funcție care poate fi obținută prin utilizarea de trasee pe un PCB. Pentru a detecta poziția, LVDT-ul, rezolverul și senzorii inductivi iau raportul dintre două tensiuni, așa cum sunt induse de perturbarea câmpului magnetic de către un element conductor.
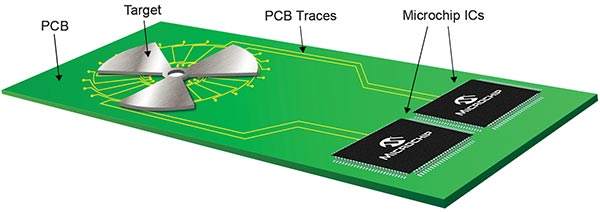
Figura 5: Senzori de redundanță (© Microchip Technology)
Mitul #6: Senzorii inductivi redundanți necesită un spațiu dublu
Aplicațiile critice din domeniul auto și industrial au adesea nevoie de redundanță pentru a oferi cel mai înalt nivel de siguranță. Prin optimizarea layer-elor unui PCB și a unor tehnici inteligente de înfășurare primară, un senzor dual nu necesită un spațiu dublu pe PCB. În schimb, ambii senzori pot ocupa același spațiu pe PCB. În acest caz, ei împart același câmp magnetic, cuplați ușor de un câmp magnetic, garantând în continuare o izolare galvanică. Semnalele secundare pot fi transmise la cele două circuite integrate, care vor emite apoi o poziție independentă și redundantă, îmbunătățind siguranța aplicației.
Mitul #7: Senzorii de poziție inductivi pot gestiona doar măsurători liniare mici
Senzorii de poziție inductivi pot măsura poziții liniare de lungimi diferite. Cea mai bună acuratețe apare atunci când lungimea senzorului este apropiată de domeniul aproximativ de măsurare dorit, astfel încât rezoluția de ieșire să poată fi scalată pe cea mai scurtă distanță. Această lungime a senzorului poate varia de la cinci mm la 600 mm și chiar mai mult pentru aplicațiile practice. Orice limitare a lungimii are legătură cu abilitatea oscilatorului de a genera semnalul de rezonanță LC corect. În toate cazurile, principiul de operare este același: se generează un câmp magnetic, iar perturbația este detectată. Măsurătorile liniare reprezintă un avantaj incontestabil oferit de această tehnologie, iar sensibilitatea poate fi obținută pe baza unui singur principiu de măsurare în multe domenii practice de măsurare. Alternativ, un senzor cu efect Hall poate necesita mai mulți senzori cu efect Hall care să fie multiplexați pe măsură ce magnetul este deplasat dintr-o locație în alta. Manipularea încrucișată a acestei multiplexări este complicată și poate fi afectată de temperaturi. Un senzor inductiv nu suferă de această dificultate și poate fi făcut să emită o măsurătoare liniară care să corespundă cerințelor aplicației.
Mitul #8: Senzorii de poziție inductivi pot efectua doar măsurători liniare
În timp ce măsurătoarea liniară reprezintă un avantaj incontestabil al acestei tehnici, senzorii de poziție inductivi pot măsura, de asemenea, traiectorii rotative și în arc de cerc ale țintelor, cu aceleași beneficii de precizie mai mare și imunitate mai bună la zgomot. Pedalele auto, supapele de aer, supapele de apă și poziția rotorului sunt exemple de detecție care pot utiliza tehnologia de detecție inductivă. Gândiți-vă la un senzor rotativ de 360 de grade ca la un simplu senzor liniar în care capetele sunt curbate pentru a se întâlni unul pe celălalt. Se pare că senzorii de poziție inductivi rotativi sunt cei mai preciși senzori, deoarece câmpul magnetic generat poate fi foarte uniform la fiecare rază. Măsurătorile liniare, în arc de cerc și rotative sunt toate posibile cu această tehnologie.
Mitul #9: Materialul țintă trebuie să fie magnetic
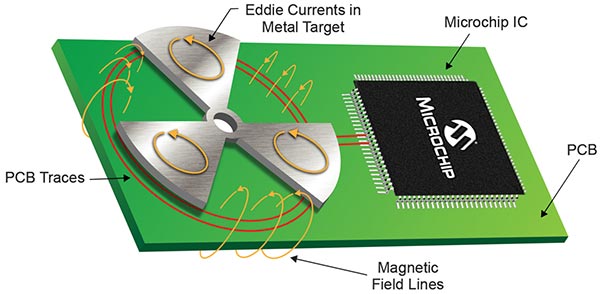
Figura 6: Curenți turbionari induși într-o structură metalică. (© Microchip Technology)
Senzorul de poziție inductiv detectează o modificare a câmpului magnetic, iar acest câmp magnetic este perturbat de o țintă metalică, dar nu este nevoie de niciun material magnetic. Orice element care conduce curentul și care permite circulația unui curent turbionar indus, va provoca această perturbare. Materialele magnetice, precum fierul, sunt conductoare, astfel încât pot fi de asemenea utilizate, însă, metalul țintă va avea o distanță de detecție mai bună și un curent de alimentare mai mic dacă este fabricat dintr-un bun conductor, precum cuprul, aluminiul sau oțelul.
Mitul #10: Senzorii de poziție inductivi trebuie să fie programați peste puterea de intrare
Într-un automobil, multe dintre aplicațiile senzorilor se află în module care sunt conectate la unitățile de control al motorului printr-un set de fire. Pentru un senzor, acesta constă în mod normal dintr-o linie de alimentare, o linie de masă și un pin de ieșire. Posibilitatea de a calibra modulul prin intermediul pinului de alimentare asigură că nu sunt necesare conexiuni suplimentare la placa de circuit imprimat a senzorului, economisind costuri și probleme de asamblare. Cu toate acestea, unele aplicații necesită un microcontroler și, în acest caz, aplicațiile încorporate (embedded) preferă să programeze senzorul folosind un alt microcontroler, nu un sistem de testare dedicat. LX3302A de la Microchip are această funcție și capabilitate, permițând programarea acestuia prin intermediul pinilor GPIO.
Mitul #11: Sunteți pe cont propriu cu proiectarea
Nu cu mult timp în urmă, pentru a obține rezultate bune era nevoie atât de cunoștințe solide despre câmpurile magnetice, cât și de acces la o suită de simulare cu elemente finite de înaltă calitate sau de multe încercări și erori. În prezent, furnizorii de circuite integrate oferă acest serviciu clienților lor cu ajutorul unor plăci de evaluare și kituri care vă permit să treceți de la faza de concepție la simulări reale de trasare pe PCB. Unii producători oferă chiar și rezultate de simulare care estimează eroarea pe care o veți avea cu un senzor înainte ca PCB-ul să fie testat. Microchip oferă această asistență pentru ca voi să nu simțiți că sunteți pe cont propriu în ceea ce privește proiectarea PCB-ului.
Aceste 11 mituri arată cum se compară senzorii de poziție inductivi cu senzorii cu efect Hall și cu cei magnetorezistivi, ilustrând precizia, imunitatea la zgomotul magnetic dispersat și rentabilitatea. Sunteți gata să încercați această tehnologie cu următorul vostru produs pentru detectarea poziției cu ajutorul inteligenței artificiale?
![]()
Autor: Mark Smith,
PhD, Product Line Marketing Manager, Mixed-Signal and Linear Division
Microchip Technology | https://www.microchip.com
![]()