

 Utilizarea roboților alimentați de la baterii este în creștere în aplicații precum automatizarea fabricilor, agricultură, livrarea produselor la domiciliu și gestionarea stocurilor în depozite. Pentru a obține un maxim de funcționare între încărcări, proiectanții acestor sisteme de baterii au trebuit să țină cont de atât de randamentul conversiei de putere, cât și de dimensiune și greutate.
Utilizarea roboților alimentați de la baterii este în creștere în aplicații precum automatizarea fabricilor, agricultură, livrarea produselor la domiciliu și gestionarea stocurilor în depozite. Pentru a obține un maxim de funcționare între încărcări, proiectanții acestor sisteme de baterii au trebuit să țină cont de atât de randamentul conversiei de putere, cât și de dimensiune și greutate.
Cu toate acestea, preocupările devin și mai critice pe măsură ce sarcinile de încărcare continuă să crească, iar caracteristicile de detectare și siguranță, cum ar fi monitorizarea video, distanța, proximitatea, locația și altele, adaugă complexitate de proiectare și greutate. În același timp, procesarea electronică adițională consumă, de asemenea, mai multă putere.
Pentru a maximiza durata de viață a bateriei în fața acestor provocări suplimentare, proiectanții pot apela la un sistem de putere distribuit, bazat pe componente, pentru a alimenta motoarele, procesoarele și alte subsisteme. Într-o astfel de abordare, fiecare componentă DC-DC de conversie a puterii poate fi plasată în punctul de sarcină PoL (Point of Load) și optimizată pentru randament ridicat, dimensiuni mici (densitate mare de putere) și performanță generală mare. Această abordare poate avea drept rezultat un sistem de alimentare cu energie mai ușor în ansamblu, permițând creșteri suplimentare de performanță pentru sistemele robotizate alimentate de la baterii. Flexibilitatea este astfel îmbunătățită, deoarece componentele de conversie a puterii pot fi paralelizate cu ușurință din motive de scalare, pe măsură ce crește cererea de putere și permit, de asemenea, aceleași arhitecturi de putere să fie implementată pe o platformă cu sisteme robotizate de diferite dimensiuni.
Cerințe de putere pentru roboți
Cerințele de alimentare pentru tipuri specifice de roboți sunt determinate de tipul aplicației:
- Roboți agricoli pentru recoltare: Plantați, întrețineți și recoltați alimente (fructe, legume, cereale) folosind deplasarea autonomă a vehiculului, împreună cu recunoașterea vizuală și mulți alți senzori de mediu și de analiză a solului. Aceste vehicule mari robotizate sunt alimentate de obicei de la o sursă de înaltă tensiune DC de 400 volți sau mai mult.
- Roboți pentru livrare: distribuția până la clienți sau în campusuri a diverselor articole și produse. În timp ce sarcina totală variază în mărime și greutate, acești roboți sunt alimentați de obicei cu baterii de 48 până la 100 volți și au cerințe pentru un timp mai lung de funcționare decât clasa de roboți care se ocupă de deplasarea stocului în depozite.
- Roboți mobili pentru depozite: asigură gestionarea inventarului și sarcini specifice pentru completarea comenzilor pe arii extinse din depozite. Această clasă de roboți este alimentată de obicei de la o sursă mobilă de energie de 24 până la 72 de volți, cu necesitatea de a încărca acumulatorul de mai multe ori pe zi, ca o condiție de bază.
Arhitecturi de sisteme cu puterea distribuită, bazate pe componente, pentru domeniul roboticii
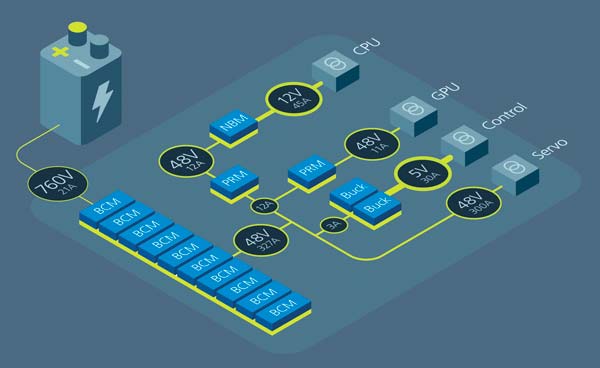
Figura 1: Rețeaua PDN pentru roboții agricoli de 15,4 kW cuprinde o magistrală de distribuție de 760 volți, care alimentează o rețea de convertoare de tensiune mai mică (BCM, PRM, NBM și coborâtoare de tensiune). (Sursa imaginii: Vicor)
Această secțiune trece în revistă patru exemple de arhitecturi de putere distribuită bazate pe componente pentru roboți variind de la un sistem de 15,9 kilowați (kW) pentru roboți agricoli pentru recoltare cu un pachet de baterii de 760 volți, până la un sistem de 1,2 kW pentru roboți de gestionare a inventarului în depozite, care utilizează un pachet de 48 de volți. O caracteristică comună în trei dintre aceste aplicații este existența unei magistrale principale de înaltă tensiune, care distribuie energia electrică în robot, urmată de una sau mai multe secțiuni de reducere a tensiunii care furnizează energia electrică necesară subsistemelor.
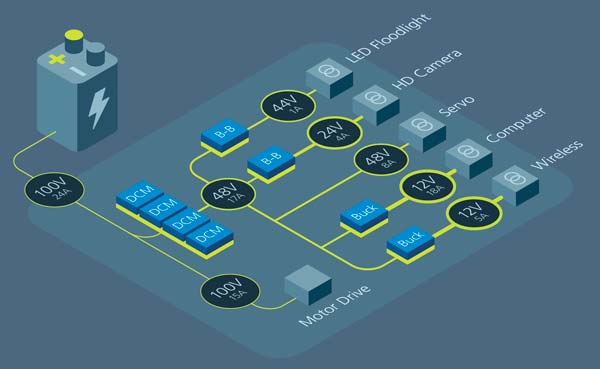
Figura 2: Rețeaua PDN pentru roboți de livrare include alimentarea directă a motorului și o magistrală intermediară pentru alimentarea subsistemelor rămase. (Sursa imaginii: Vicor)
O magistrală de distribuție a puterii de înaltă tensiune are drept rezultat un randament îmbunătățit și curenți de distribuție de putere redusă, ceea ce permite utilizarea cablurilor de alimentare de dimensiuni mai mici, mai ușoare și mai puțin costisitoare. A patra aplicație prezintă modul cum se simplifică alimentarea cu energie în cazul roboților de dimensiuni mai mici, care utilizează acumulatoare de 48 de volți.
Rețeaua de furnizare a puterii (PDN – Power Delivery Network) pentru roboții agricoli utilizați pentru recoltare cuprinde o magistrală de alimentare principală de 760 volți (Figura 1). Această tensiune alimentează o serie de convertoare DC-DC izolate cu raport fix, nestabilizate (prezentate ca module BCM în stânga imaginii) cu o tensiune de ieșire de 1/16 din tensiunea de intrare. Aceste convertoare sunt utilizate în paralel, permițând redimensionarea sistemului în funcție de necesitățile specifice ale proiectului.
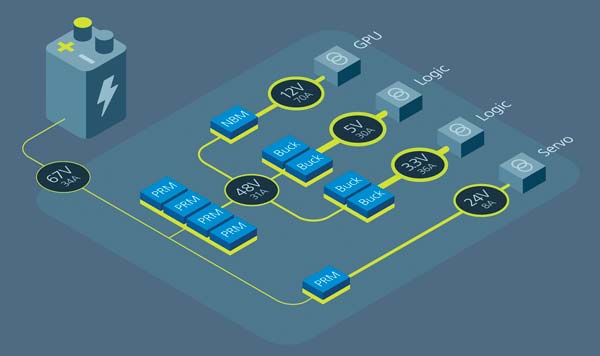
Figura 3: Rețeaua PDN pentru roboții din depozite combină o magistrală de alimentare principală de 67 volți și o magistrală intermediară de distribuție a puterii de 48 de volți. (Sursa imaginii: Vicor)
Mai departe în rețea, se regăsesc o serie de convertoare cu raport fix (NBM, zona mediană-superioară), stabilizatoare ridicătoare de tensiune (PRM, centru) și convertoare coborâtoare de tensiune (zona inferioară), care alimentează traseele de tensiune mai mică, după cum este necesar. În acest design, servomotorul este alimentat direct de la magistrala de putere intermediară de 48 de volți, fără altă conversie DC-DC suplimentară.
Rețeaua PDN pentru roboții de livrare prezintă modul cum se simplifică arhitectura unui sistem de putere medie care utilizează o tensiune mai mică pe magistrala principală de alimentare (în acest caz, 100 volți) și cum se adăugă stabilizatoare DC-DC izolate (DCM) pe magistrala principală, pentru a produce tensiunea magistralei intermediare de 48 volți (Figura 2).
Această abordare permite utilizarea convertoarelor DC-DC ridicătoare/coborâtoare de tensiune neizolate pentru alimentarea diferitelor subsisteme. În plus, utilizarea unei tensiuni mai mici pentru magistrala principală de putere permite driverului motorului să se conecteze direct la magistrala principală, în timp ce motorul servo se poate conecta direct la magistrala intermediară de 48 de volți. Roboții mai mici de livrare pot dispune de o magistrala intermediară de tensiune de 24 sau de 48 de volți, dar arhitectura generală este similară.
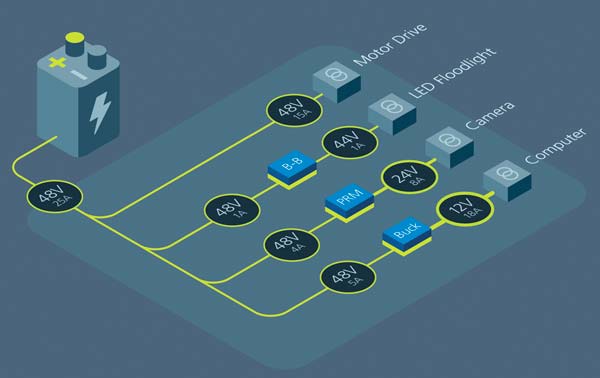
Figura 4: Rețeaua PDN pentru roboții utilizați în depozit, care utilizează o baterie de 48 de volți, elimină necesitatea unei magistrale de alimentare intermediare, simplificând foarte mult proiectarea. (Sursa imaginii: Vicor)
PDN-ul pentru roboții din depozite care utilizează un acumulator de 67 volți evidențiază utilizarea convertoarelor DC-DC coborâtoare/ridicătoare neizolate (PRM) pe magistrala principală de alimentare (Figura 3). Aceste convertoare oferă un randament de la 96% la 98% și pot fi conectate în paralel pentru a furniza un curent mai mare în rețea. De asemenea, această arhitectură dispune de un convertor DC-DC cu raport fix, neizolat (NBM), pentru a alimenta GPU-ul și de stabilizatoare coborâtoare de tensiune, neizolate, care alimentează secțiunile logice.
Pentru proiectele de roboți mai mici, care utilizează o baterie de 48 de volți, nu este necesar să se genereze o tensiune intermediară a magistralei, simplificând proiectarea (Figura 4). Componentele sunt alimentate direct de la tensiunea acumulatorului prin conversie directă, utilizând diferite convertoare DC-DC neizolate. Eliminarea magistralei intermediare de alimentare crește randamentul sistemului și reduce greutatea și costurile acestuia.
Considerații privind proiectarea unei arhitecturi cu puterea distribuită
După s-a arătat mai sus, proiectanții trebuie să facă numeroase alegeri în cazul sistemului de alimentare pentru a optimiza o rețea PDN pentru aplicații robotice. Nu există o abordare unică pentru toate sistemele. În general, roboții mai mari beneficiază de tensiuni mai mari ale acumulatorului, ceea ce poate duce la randamente mai mari de distribuție a puterii și la magistrale de distribuție a puterii mai mici și mai ușoare.
Utilizarea convertoarelor DC-DC izolate sau a celor neizolate este un aspect important atunci când se dorește creșterea randamentului general al sistemului și la minimizarea costurilor. Cu cât convertorul DC-DC este mai aproape de o sarcină de joasă tensiune, cu atât este mai probabil ca alegerea optimă să fie o componentă cu costuri mai mici, neizolată, care va crește randamentul general al rețelei PDN. Atunci când este cazul, utilizarea convertoarelor DC-DC cu raport fix (nestabilizate), care au costuri mai mici, poate contribui la un randament mai ridicat al rețelei PDN.
Figura 5: Convertorul regulator DC-DC izolat DCM3623TA5N53B4T70 poate produce tensiunea necesară magistralei intermediare de 48 volți fiind alimentat de la un acumulator de 100 volți. (Sursa imaginii: Vicor)
Vicor oferă convertoare DC-DC capabile să susțină nevoile proiectanților pentru o plajă largă de arhitecturi de putere distribuită bazate pe componente, inclusiv cele patru prezentate mai sus. Următoarea discuție se axează pe dispozitive specifice, care pot fi utilizate într-un sistem de furnizare a puterii asemănător sistemului descris pentru roboții de livrare și prezentat în figura 2.
Convertoare DC-DC pentru sistemele de alimentare ale roboților
DCM3623TA5N53B4T70 este un exemplu de stabilizator DC-DC izolat (DCM) care poate produce tensiunea necesară magistralei intermediare de 48 volți, fiind alimentat de la tensiunea acumulatorului de 100 volți (Figura 5). Acest convertor folosește tehnologia de comutare ZVS (Zero Voltage Switching) pentru a oferi un randament maxim de 90,7% și o densitate de putere de 653 wați per inci3. Convertorul oferă o izolare de 3.000 volți curent continuu între intrare și ieșire.
Profitând de avantajele termice și de densitate oferite de tehnologia de încapsulare ChiP (Converter-housed-in-Package) de la Vicor, modulul DCM oferă opțiuni flexibile de management termic cu impedanțe termice foarte scăzute în partea de sus și de jos. Componentele de putere bazate pe ChiP permit proiectanților să obțină soluții de sisteme de alimentare eficiente din punct de vedere al costurilor, într-o manieră rapidă și fiabilă, cu caracteristici de dimensiune, greutate și randament, inegalabile.
Figura 6: Placa de evaluare DCM3623EA5N53B4T70 permite proiectanților să exploreze capacitățile convertorului DC-DC DCM3623TA5N53B4T70. (Sursa imaginii: Vicor)
Pentru a începe explorarea capabilităților modulului DCM3623TA5N53B4T70, proiectanții pot utiliza placa de evaluare DCM3623EA5N53B4T70 (Figura 6). Placa de evaluare a modulelor DCM poate fi configurată pentru diferite scheme de activare și monitorizare a defecțiunilor, precum și pentru a exercita diferite moduri de ajustare a semnalului în funcție de cerințele aplicației.
DCM3623EA5N53B4T70 poate fi utilizată pentru a evalua DCM-urile, fie într-o configurație unitară, fie într-o înseriere de module. De asemenea, suportă evaluarea diferitelor opțiuni de activare/pornire, tăiere și monitorizare a erorilor:
Opțiuni de activare/pornire:
- Comutator mecanic integrat (implicit)
- Control extern
Opțiuni de ajustare a semnalului:
- Operațiunea de ajustare fixă (implicită): pinului TR îi este permis să aibă o stare flotantă la pornirea inițială. DCM-ul dezactivează ajustarea pe ieșire, tensiunea de ieșire fiind setată la valoarea nominală VOUT.
- Operațiunea de ajustare cu un rezistor variabil existent pe placă: Tensiunea pe pinul de ajustare este direct proporțională cu poziția cursorului unui potențiometru conectat în paralel cu un rezistor PULL-UP din interiorul DCM, conectat la VCC.
- Operațiunea de reglare prin control extern: Tensiunea pe pinul de ajustare este controlată prin intermediul unui semnal extern, care are drept referință pinul –IN al fiecărui DCM specific din sistem.
Opțiuni pentru monitorizarea defecțiunilor:
- LED integrat: pinul FT activează un LED pentru o avertizare vizuală asupra stării defecțiunii.
- Optocuplor integrat: pinul FT acționează un optocuplor integrat în sistem pentru a transmite starea defecțiunii peste limita de izolare dintre primar și secundar.

Figura 7: Convertorul ridicător/coborâtor DC-DC PI3740-00 de tip SiP poate fi utilizat pentru a alimenta proiectoare cu LED-uri și camere HD în rețele PDN pentru roboți de livrare în campus. (Sursa imaginii: Vicor)
Convertorul DC-DC ridicător/coborâtor de tensiune PI3740-00 de la Vicor poate fi utilizat pentru a produce o tensiune de 44 și 24 volți, pentru alimentarea proiectoarelor cu LED-uri și, respectiv, a camerelor de înaltă definiție (HD). Este un convertor ZVS cu randament ridicat și cu o gamă largă a tensiunilor de intrare și de ieșire. Acest sistem încapsulat (SiP – System in Package) de înaltă densitate integrează un controler, comutatoare de putere și componentele adiacente (Figura 7). Are un randament maxim de până la 96%, precum și un randament bun la sarcină redusă.
Pentru a forma un stabilizator ridicător/coborâtor de tensiune complet, PI3740-00 necesită un inductor extern, un divizor rezistiv și condensatori. Frecvența de comutație de 1 megahertz (MHz) reduce dimensiunea componentelor de filtrare externe, îmbunătățește densitatea de putere și permite un răspuns dinamic rapid la alimentare și la sarcinile tranzitorii.
Pentru a începe proiectarea cu PI3740-00, Vicor furnizează placa PI3740-00-EVAL1 pentru a evalua modulul PI3740-00 în aplicații cu tensiune constantă în care tensiunea de ieșire (VOUT) este peste 8 volți. Placa funcționează fiind alimentată de la o tensiune de intrare între 8 și 60 VCC și suportă tensiuni de ieșire de până la 50 VCC. Caracteristicile acestei plăci de evaluare includ:
- Borne de intrare și ieșire pentru conexiunile la sursă și la sarcină
- Un loc de amplasare a unui condensator electrolitic de aluminiu (THT) pe intrare
- Filtrarea sursei de intrare
- Conector Jack pentru sonda de osciloscop pentru măsurători exacte, de înaltă frecvență, ale tensiunilor de intrare și ieșire
- Puncte de testare ale pinilor de semnal și conectorii pentru fire
- Puncte și prize de testare a tensiunii Kelvin pentru toți pinii PI3740
- Detectarea curentului pe intrare / ieșire selectabilă prin jumper
- Tensiune flotantă selectabilă prin jumper

Figura 8: Regulatorul coborâtor de tensiune PI3526-00-LGIZ de la Vicor poate fi utilizat pentru a furniza tensiunea de 12 volți necesară pentru un computer și/sau subsisteme wireless din PDN-ul roboților de livrare în campus. (Sursa imaginii: Vicor)
Regulatorul coborâtor de tensiune PI3526-00-LGIZ de la Vicor poate fi utilizat pentru a furniza o tensiune de 12 volți pentru un computer și pentru subsisteme wireless din PDN (Figura 8). Acest convertor DC-DC oferă un randament de până la 98% și suport pentru pornire lină și monitorizare, reglabile de către utilizator, care includ posibilitatea de a limita variația curentului. Aceste regulatoare ZVS integrează un controler, comutatoare pentru alimentare și componentele adiacente într-o configurație SiP.
Placa de evaluare PI3526-00-EVAL1 de la Vicor poate fi configurată pentru realiza experimente cu regulatorul coborâtor de tensiune PI3526-00-LGIZ într-o configurație simplă sau pentru monitorizarea de la distanță. Soclurile sunt proiectate pentru a permite atașarea facilă a sondelor și permit amplasarea unui condensator pe intrare. Placa de evaluare asigură borne de conectare, amprente pentru conectori jack banană pentru conexiunile de intrare și ieșire, conectori de semnal și puncte de testare precum și conectori jack Kelvin Johnson pentru măsurători precise de tensiune a nodului de alimentare.
Concluzii
Cerințele de conversie a puterii pentru un sistem robotizat devin mai provocatoare pe măsură ce capacitățile de încărcare, recunoașterea vizuală și funcționalitatea pentru utilizator cresc complexitatea roboților. Soluțiile de alimentare existente pot suferi de limitări de performanță în ceea ce privește dimensiunea, randamentul, greutatea și redimensionarea, ceea ce le face mai puțin potrivite pentru aplicațiile robotice. Pentru asemenea aplicații de robotică, proiectanții pot apela la arhitecturi de putere distribuită bazate pe componente pentru a alimenta motoarele, procesoarele și alte sisteme.
Așa cum s-a arătat, această abordare poate avea ca rezultat un sistem de alimentare cu greutate mai mică, permițând creșteri suplimentare de performanță pentru robotica alimentată de la baterii. De asemenea, flexibilitatea este îmbunătățită deoarece componentele de conversie a puterii electrice pot fi conectate în paralel pentru a modifica rapid sistemul pe măsură ce crește cererea de putere, permițând aceleiași arhitecturi de alimentare să fie implementată pe o platformă de sisteme robotizate de diferite dimensiuni.
Articole recomandate
- Reducing Robot Risk: How to Design a Safe Industrial Environment
- Use Compact Industrial Robots to Make Any Shop More Productive

Autor: Rolf Horn – Inginer de aplicații
Rolf Horn, face parte din grupul European de Asistență Tehnică din 2014, având responsabilitatea principală de a răspunde la întrebările venite din partea clienților finali din EMEA referitoare la Dezvoltare și Inginerie, precum și la scrierea și corectarea articolelor și postărilor de pe platformele TechForum și https://maker.io ale firmei Digi-Key pentru cititorii din Germania. Înainte de Digi-Key, el a lucrat la mai mulți producători din zona semiconductorilor, cu accent pe sistemele embedded ce conțin FPGA-uri, microcontrolere și procesoare pentru aplicații industriale și auto. Rolf este licențiat în inginerie electrică și electronică la Universitatea de Științe Aplicate din Munchen, Bavaria. Și-a început cariera profesională la un distribuitor local de produse electronice în calitate de Arhitect pentru Soluții de Sistem pentru a-și împărtăși expertiza și cunoștințele în calitate de consilier de încredere.
Hobby-uri: petrecerea timpului cu familia + prietenii, călătoriile (cu rulota familiei VW-California) și motociclismul (pe un BMW GS din 1988).
Digi-Key Electronics | https://www.digikey.ro
![]()