

 Roboții SCARA sunt utilizați în industrie pentru automatizarea și creșterea eficienței proceselor Pick & Place și a proceselor mici de asamblare, precum înșurubarea, dozarea sau mutarea componentelor între procese. Recent, aplicațiile în care efectuează teste funcționale – cum ar fi activarea butonului – sunt, de asemenea, populare.
Roboții SCARA sunt utilizați în industrie pentru automatizarea și creșterea eficienței proceselor Pick & Place și a proceselor mici de asamblare, precum înșurubarea, dozarea sau mutarea componentelor între procese. Recent, aplicațiile în care efectuează teste funcționale – cum ar fi activarea butonului – sunt, de asemenea, populare.
Ca orice tehnologie anterioară de automatizare a proceselor, robotizarea trebuie să ofere valoare adăugată prin creșterea productivității și reducerea costurilor pentru proprietarii săi. În orice proiect industrial, viteza și calendarul trebuie monitorizate cu atenție, precum și precizia, repetabilitatea și fiabilitatea, pentru a asigura o rentabilitate satisfăcătoare a investiției.
Se poate observa că, în același timp, performanța și funcționalitatea roboților SCARA avansează. Noile modele permit roboților mai mici să îndeplinească sarcini din ce în ce mai grele, menținând viteze ridicate și cicluri scurte. Sistemele de vizualizare funcționează acum ca ‘plug-and-play’, ceea ce simplifică și mai mult instalarea și programarea. În plus, sunt introduse noi soluții pentru a reduce uzura mecanică și pentru a îmbunătăți întreținerea. Putem analiza aceste schimbări privind în interiorul roboților moderni SCARA.
Mișcare și echilibru
Inovațiile pentru a îmbunătăți controlul asupra mișcării vârfului ajută la creșterea atât a vitezei, cât și a preciziei poziționale. Procesele de alegere și plasare necesită mișcare pe verticală sau pe axa Z, bine controlată, precum și mișcarea de rotație sau axa R. În mod tradițional, mișcarea pe axa Z este gestionată folosind un șurub de plumb acționat de motorul arborelui vertical, în timp ce axa R este acționată de cureaua de la motorul arborelui rotativ.
Ambele curele de transmisie pot fi înlocuite cu transmisii directe, ceea ce elimină problemele legate de îmbătrânirea, întinderea sau fisurarea curelei și, prin urmare, mărește precizia și elimină necesitatea întreținerii și schimbărilor regulate ale curelelor. YAMAHA a dezvoltat o acționare directă cu un șurub cu bile pentru controlul axei Z fără curea.
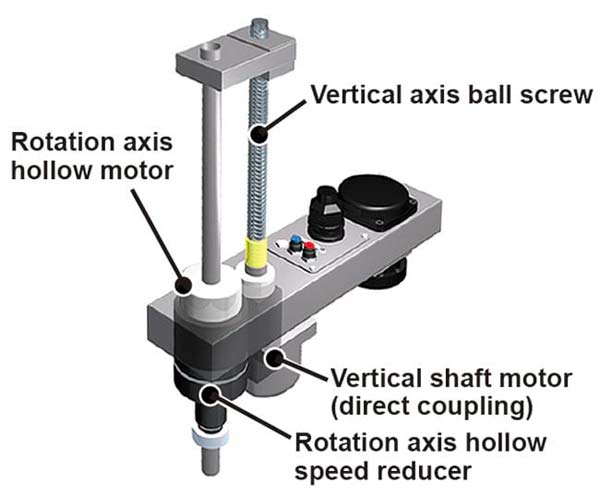 Yamaha a dezvoltat un mecanism direct de acționare cu șurub cu bile pentru controlul axei Z fără curea, valorificându-și experiența în producția de roboți cu deplasare pe o singură axă, precum și pe baza unei combinații motor tubular / reductor pentru reducerea vitezei coaxiale care oferă mai multe avantaje pentru controlul mișcării axei R. În plus, optimizarea rapoartelor de tracțiune contribuie la obținerea celei mai rapide viteze de rotație și mișcare x-y în toată zona de lucru a mașinii, rezultând timpi de ciclu mai mici. Acest lucru este deosebit de important pentru procesele care implică deplasarea obiectelor pe distanțe mari.
Yamaha a dezvoltat un mecanism direct de acționare cu șurub cu bile pentru controlul axei Z fără curea, valorificându-și experiența în producția de roboți cu deplasare pe o singură axă, precum și pe baza unei combinații motor tubular / reductor pentru reducerea vitezei coaxiale care oferă mai multe avantaje pentru controlul mișcării axei R. În plus, optimizarea rapoartelor de tracțiune contribuie la obținerea celei mai rapide viteze de rotație și mișcare x-y în toată zona de lucru a mașinii, rezultând timpi de ciclu mai mici. Acest lucru este deosebit de important pentru procesele care implică deplasarea obiectelor pe distanțe mari.
Roboții SCARA actuali cu acționare fără curea sunt disponibili cu lungimea brațului de până la aproximativ 1200 mm și cu o sarcină utilă maximă de aproximativ 50 kg. Modelele mai mici, cu lungimea brațului de până la aproximativ 120 mm și 1 kg sarcină utilă maximă permit utilizatorilor să configureze celule de asamblare eficiente din punct de vedere spațial, care ocupă o zonă mică din fabrică.
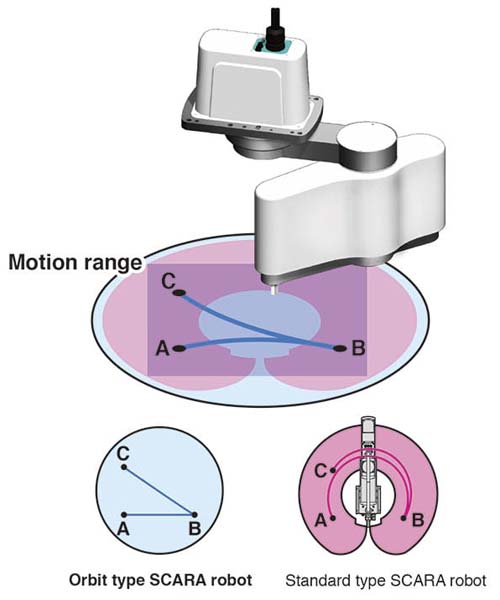
Acolo unde spațiul din fabrică este deosebit de redus, roboții SCARA orbitali cu montare în tavan permit o libertate suplimentară în ceea ce privește zona unde are loc procesul de producție. Cu roboții SCARA orbitali, echilibrul optim al greutății este esențial pentru obținerea unui raport eficient excursie mare în viteză / capabilitate mare de încărcare. Pe lângă experiența sa în motoare tubulare și reductoare, Yamaha combină utilizarea unor materiale ușoare cu poziționarea optimizată a motorului intern, pentru a atinge un timp standard pentru deplasarea pe orizontală pe o distanță de 300 mm, cu oscilații (sus/jos) de 25 mm, a unei încărcături de 1 kg în doar 0.29 secunde, ceea ce este cu aproximativ 36% mai rapid decât timpul obținut la modelele anterioare.
Sarcina utilă maximă este de 5 kg. Un alt avantaj care rezultă din echilibrul superior și inerția mai mică este reducerea eforturilor exercitate asupra cadrului de montare care trebuie instalat pentru a transporta robotul. Acest lucru permite un design ușor, simplificat, care economisește costurile și facilitează instalarea în fabrică.
 Inovații care sporesc eficiența
Inovații care sporesc eficiența
Precizia de poziționare pe termen lung și imunitatea la contaminanții din mediu, cum ar fi umezeala, praful și grăsimea, pot fi îmbunătățite prin înlocuirea senzorilor optici cu cei magnetici pentru detectarea poziției. Senzorii magnetici sunt inerent imuni la șocuri și zgomot electric, care pot interfera cu senzorii optici. Senzorul magnetic beneficiază de o construcție simplă cu componente electronice minime, asigurând o fiabilitate mai mare și performanțe la temperaturi ridicate.
În plus, o atenție atentă la simplificarea întreținerii poate avea un efect valoros asupra creșterii timpului de funcționare a echipamentelor. Proiectarea panourilor pentru îndepărtarea ușoară a acestora, fără a fi nevoie să detașați cablurile sau conductele, permite efectuarea rapidă a lucrărilor curente de reparații sau a reparațiilor esențiale, care urmează să fie finalizate rapid. În plus, cele mai recente formule de grăsime cu durată lungă de viață elimină operațiile consumatoare de timp, precum demontarea și lubrifierea sistemului, pe toată durata de viață a echipamentului.
Sisteme de vizualizare ‘Plug-and-Play’
Adăugarea vizualizării extinde gama de funcții pe care robotul le poate îndeplini pentru a include căutarea pieselor de prelucrat și corectarea abaterilor de poziție. Din punct de vedere istoric, vizualizarea automată a fost controlată separat de robot, necesitând cunoștințe de vizualizare specializate pentru a programa sistemul de vizualizare și pentru a utiliza datele din instrucțiunile robotului. Cele mai recente sisteme de vizualizare elimină această barieră, integrând vizualizarea în programul robotului pentru a permite funcționarea ‘plug-and-play’ și reduc considerabil timpul de pornire. De asemenea, este eliminat decalajul de comunicare între sistemele de vizualizare și robot. Sistemul de vizualizare iVY2 Yamaha și controlerul RCX340 de la Yamaha îmbunătățesc și mai mult performanța cu inovații precum o nouă comandă CTMOVE care execută un ciclu complet de urmărire a transportorului de la poziția de pornire la preluarea componentelor, care înlocuiește trei instrucțiuni separate pentru a permite alegerea și plasarea până la 100 cpm.
Cerințe speciale
În cele din urmă, configurațiile noi pot fi considerate că satisfac cerințele speciale. Roboții SCARA de tip invers sunt special creați pentru a ridica piesa de prelucrat de jos, ceea ce previne contaminarea prin căderea particulelor precum praful sau umezeala care se pot aduna pe suprafața robotului. Sunt disponibili, de asemenea, roboți SCARA pentru camere curate, care beneficiază de o funcționare fără curea, eliminând contaminanțiile din cauza deteriorării curelei și conține aspirație încorporată în partea din spate a mașinii pentru a preveni emisia de praf.
ULTIMELE MODELE
În acest moment este important să menționăm cei mai recenți roboți de la YAMAHA: SCARA YK610XE-10 cu o lungime a brațului de 610 mm și YK710XE-10 cu o lungime a brațului de 710 mm. Ambii roboți au fost lansați pe 16 aprilie 2020. Cele două noi modele se bazează pe tehnologia reușită a seriei actuale YK-XE cu o sarcină utilă maximă de 10 kg și un ciclu de lucru standard de 0.39 secunde (YK610XE-10) sau 0.42 secunde (YK710XE-10). Împreună cu robotul SCARA YK400XE-4 cu o lungime a brațului de 400 mm, lansat la sfârșitul anului 2019, seria YK-XE include trei modele, oferind o gamă largă de aplicații – de la manipularea și sortarea componentelor mici în producție, de ex. smartphone-uri și computere lucrând cu componente mari, cum ar fi cele utilizate în echipamentele de uz casnic și auto.
Trebuie adăugat că acest prim robot din seria XE – SCARA YK400XE-4 cu o lungime a brațului de 400 mm – este acum oferit de YAMAHA Motors într-un set cu un controler RCX340, de ultimă generație, la o ofertă specială de preț, limitată în timp. Promoția include, de asemenea, seturi într-o opțiune alternativă cu o altă unitate SCARA – renumitul model YK400 XR cu o lungime a brațului de 400 mm și o capacitate de sarcină lucru de până la 3 kg. Mai multe informații despre noile modele aici: https://tinyurl.com/YK-XE-XR
Concluzie
Proiectarea robotului SCARA se îmbunătățește în multe moduri subtile, de la vârful rotativ la interfața controlerului, pentru a crește performanța, viteza și fiabilitatea, permițând o productivitate mai mare și o rentabilitate mai mare a investiției. Roboții YAMAHA și alte echipamente din gama RENEX Group pot fi vizualizate și testate funcțional la RENEX TECHNOLOGICAL CENTRE și DEMOROOM.
Contact:
Andrei Bratanov – National Sales Manager
Strada Văliug, nr. 32, Sector 1
13986 București, ROMÂNIA
T: +40 799 774 330
E: Andrei.Bratanov@renex.ro