


Utilizarea controlerelor de semnal digital (DSC) pentru controlul fără senzori al motoarelor de curent continuu fără perii (BLDC) conduce la aplicaţii de serie, economice, explică Charlie Ice, de la Microchip Technology Inc.
Ca tehnologie apreciată în cazul sistemelor din gamele superioare şi medii, motoarele fără perii (BLDC) oferă o viteză de comandă constantă sau variabilă, combinată cu siguranţă mare de funcţionare şi simplitate de control. Utilizarea fie şi a câtorva senzori Hall, se adaugă costului total al sistemului, scoţând din joc utilizarea BLDC în aplicaţii economice. Încercările anterioare de control fără perii au condus tot la preţuri suplimentare, excluzând aplicaţiile de masă, deoarece necesitau controlere costisitoare pentru a rula algoritmi de înlocuire a senzorilor.
Acum, cu un cost de volum de aproape un dolar pe unitate, controlerele de semnal digital (DSC), precum Microchip dsPIC33FJ15MC102, pot depăşi aceste obstacole şi pot face din controlul motoarelor BLDC fără senzori o alegere viabilă pentru aplicaţii economice.
BLDC cu senzori
Pentru a înţelege cum lucrează controlul motoarelor BLDC fără senzori, este util a se lua la început în considerare modelul de bază al controlului cu senzori.
Motorul BLDC utilizează o bobină energizată, sau stator, ce face ca un magnet permanent
de pe rotor, sau arbore, să se alinieze cu bobina, şi să rotească rotorul pentru a genera cuplu. Într-un motor trifazat BLDC, cele trei bobine ale statorului, sau fazele, sunt pornite şi oprite secvenţial înaintea rotorului. Pentru a face ca rotorul să se rotească fără şocuri, motorul este construit utilizând seturi multiple de bobine pentru fiecare bobină sau fază, iar fiecare fază trebuie alimentată într-o ordine specifică. Poziţia rotorului dictează care fază trebuie să fie alimentată şi care nu. De aici rezultă că este foarte importantă cunoaşterea poziţiei rotorului, iar controlerul trebuie să comute activ fazele astfel încât motorul BLDC să opereze. Cea mai simplă cale de a calcula poziţia rotorului este utilizarea unor senzori cu efect Hall, care generează pulsuri ce permit controlerului identificarea poziţiei. Odată identificată poziţia rotorului, controlerul de bază al BLDC trebuie doar să identifice corespondenţa cu alimentarea fazelor şi să le comute corespunzător.
BLDC fără senzori
Aruncând o privire mai îndeaproape asupra celor trei faze ale unui motor BLDC se poate explica modul în care algoritmul BLDC fără senzori poate calcula poziţia rotorului.
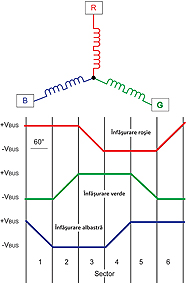
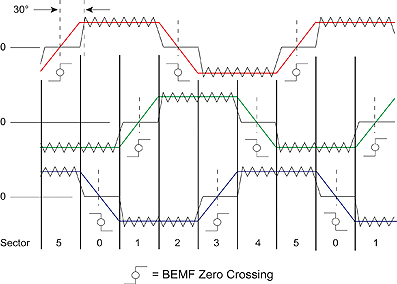
În cazul unui semnal de comandă trapezoidal, o fază trece în nivel superior (+VBUS), o fază trece în nivel inferior (-VBUS), iar a treia fază este inactivă în orice moment. Forma de undă pentru comanda fiecărei faze este de formă trapezoidală, după cum se poate observa în figura 1. Când rotorul trece printr-o fază, magnetul permanent de pe rotor induce un curent în fază, ceea ce conduce la o tensiune cunoscută ca forţă electromotoare (EMF). Aceasta este dependentă de numărul de rotaţii ale fiecărei faze, de viteza unghiulară a rotorului şi de tăria magnetului permanent al rotorului. Forma de undă a forţei electromotoare de pe fiecare fază este în directă legătură cu poziţia rotorului, de aceea putând fi utilizată pentru determinarea poziţiei rotorului. Există numeroase metode în a utiliza back EMF pentru a determina poziţia rotorului, una dintre cele mai cunoscute şi robuste fiind detecţia trecerii prin zero (zero-crossing detection). Atunci când unul dintre semnalele EMF trece prin zero, controlerul trebuie să comute conform fazele. Acest proces, cunoscut drept comutaţie, este prezentat în figura 2.
Pentru a păstra avansul rotorului, trebuie să existe un decalaj între punctul la care apare trecerea prin zero şi momentul apariţiei comutaţiei. Controlerul trebuie să calculeze şi compenseze acest lucru. O cale simplă de de a implementa metoda cu trecere prin zero este cea prin care se consideră apariţia trecerii prin zero ori de câte ori EMF de pe fiecare dintre faze atinge valoarea VBUS/2.
Această metodă poate fi implementată cu uşurinţă prin utilizarea câtorva amplificatoare operaţionale configurate ca şi comparatoare. Totuşi, acest lucru prezintă un număr de probleme: tensiunea electromotoare EMF este tipic mai mică decât VBUS, astfel încât trecerea prin zero nu se întâmplă în mod necesar la VBUS/2; suplimentar, proprietăţile fiecărei faze pot fi diferite, astfel încât tensiunea electromotoare pentru trecerea prin zero a unei faze poate fi diferită de a alteia. În concluzie, această metodă simplă de detecţie cauzează decalaje de fază pozitive şi negative în semnalul de detecţie a semnalelor EMF.
BLDC din lumea reală
În aplicaţiile din lumea reală, tensiunea de prag la trecerea prin zero variază considerabil. Această tensiune de prag variabilă este totuşi egală cu tensiunea punctului neutru al motorului, deoarece aceasta este media tensiunii electromotoare EMF de pe toate cele trei faze. De aceea, ori de câte ori back EMF de pe oricare fază egalează punctul neutru al motorului, apare un eveniment de trecere prin zero, iar controlerul trebuie să comute. Acest lucru poate fi realizat prin utilizarea de rezistenţe şi amplificatoare operaţionale, sau prin utilizarea modulului ADC şi software-ului de pe controler. Cu un controler programabil precum dsPIC® DSC, tensiunea electromotoare indusă pe fiecare fază poate fi eşantionată utilizând modulul ADC, iar punctul neutru poate fi recreat cu uşurinţă în software, luând în calcul media celor trei semnale back-EMF. Software-ul poate compara apoi această valoare cu semnalul EMF detectat pe faze, determinând momentul trecerii prin zero. Odată apărut acest eveniment, controlerul comută alimentarea fazelor şi procesul se reia. Utilizarea tensiunii electromotoare induse pe motor pentru detectarea trecerii prin zero înseamnă că senzorul poate fi eliminat din sistem fără compromiterea performanţelor.
Sistemele din lumea reală introduc şi alte provocări suplimentare în cazul operării fără senzori. Prima problemă este aceea că, la viteze mici valoarea EMF este foarte mică şi dificil de detectat. De aceea, controlerul trebuie să ghicească poziţia rotorului până când motorul se învârte suficient de rapid pentru a genera un EMF suficient de mare pentru operarea în mod fără senzori. Un controler programabil software permite ca pornirea sistemului să fie croită pe caracteristicile fiecărei aplicaţii, minimizând în acest fel efectul acestei probleme. O altă problemă este zgomotul de comutaţie de la MOSFET-uri. Deoarece MOSFET-urile comută pentru a schimba tensiunea pe fiecare fază, ele introduc zgomot în tensiunea electromotoare, aspect detectat de modulul ADC al controlerului. Acest zgomot trebuie să fie filtrat, pentru a recrea precis back EMF-ul fiecărei faze. Un DSC are un motor DSP integrat în procesor, ce poate fi cu uşurinţă utilizat pentru implementarea unui filtru digital, eliminând zgomotul de comutaţie. Utilizarea unui controler programabil software poate oferi de asemenea soluţii mai simple şi pentru alte provocări, specifice fiecărei aplicaţii.
Reducerea costurilor de dezvoltare
Noi unelte de dezvoltare, optimizate pentru controlul BLDC fără senzori, pot reduce semnificativ costurile şi timpii de dezvoltare pentru implementarea BLDC fără senzori pentru producţii de masă şi pentru alte aplicaţii. Kit-ul de start pentru control motoare de la Microchip, prezentat în figura 3, costă mai puţin de 100 USD şi include note de aplicaţii detaliate, precum şi exemple de software şi scheme hardware. Furnizorii de controlere pentru motoare, inclusiv Microchip, furnizează în mod obişnuit gratuit spre descărcare fişiere cu informaţii şi software, ceea ce face ca procesul de învăţare să devină şi mai uşor.
Concluzii
DSC-urile reduc costurile controlului motoarelor BLDC. Acest control poate fi implementat utilizând DSC-uri ce au un cost în producţii de volum ridicat de aproximativ 1 dolar pe unitate, şi cu unelte de dezvoltare ce costă sub 100 USD. Suplimentar sunt disponibile gratuit scheme, software şi note de aplicaţii. Acestea sunt motive întemeiate pentru care BLDC fără senzori încep să îşi găsească locul în aplicaţii economice de serie.

Microchip Technology
www.microchip.com