

Descoperirile fizicienilor de la sfârşitul secolului XVIII şi începutul secolului XIX, cum sunt Jean Baptiste Biot, Félix Savart sau André-Marie Ampère cu privire la electromagnetism au fost fructificate prin apariţia multor dispozitive rămase până astăzi în utilizarea curentă. Printre cele mai fascinante se numără motoarele electrice, dintre care o poziţie specială ocupă motoarele pas cu pas. Cu greu ne-am putea imaginea lumea actuală fără acestea.
Cel mai simplu motor electric poate fi realizat cu ajutorul unui mic magnet neodim, o baterie AAA şi o buclă de sârmă de cupru modelată corespunzător. Sigur că un asemenea motor nu are nicio caracteristică utilă, dar tocmai aceste idei foarte simple au constituit germenii unor dispozitive geniale, care au dominat mai apoi multe domenii ale tehnicii. De-a lungul anilor, au apărut atât de multe tipuri de motoare electrice, încât enumerarea lor nu ar fi în prezent uşoară. Le întâlnim în multe echipamente, adesea chiar fără să ne dăm seama de acest lucru. O grupă specifică o reprezintă motoarele pas cu pas.
Principiul de funcţionare al motorului pas cu pas
Funcţionarea motorului pas cu pas, ca şi cea a oricărui alt motor electric, constă în
crearea unui câmp magnetic care, acţionând asupra unei bobine, determină rotirea rotorului. Spre deosebire de motoarele electrice “obişnuite”, rotorul motorului pas cu pas, după aplicarea impulsului de alimentare, execută o rotaţie cu un unghi strict determinat. Modurile de alimentare (comandă) depind de tipurile de motoare pas cu pas, însă în fiecare dintre acestea, pentru obţinerea unei rotaţii continue (dar în salturi), este necesară aplicarea unei serii de impulsuri.
Câmpul magnetic necesar funcţionării motorului pas cu pas poate fi creat în câteva moduri. Până nu demult, erau destul de frecvent utilizate motoarele cu reluctanţă variabilă VM (Variable Magnet), în care câmpul magnetic era creat de bobine, corespunzător construite, înfăşurate pe un stator imobil.
În prezent, unul dintre cele mai des utilizate tipuri de motoare este motorul PM (Permanent Magnet), în care câmpul magnetic era creat de un magnet permanent. În continuare, acest tip de motor este tot mai adesea înlocuit de motoare hibrid, care reprezintă, într-o anumită măsură, o combinare a ideilor motoarelor VM şi PM, dar care se deosebesc însă printr-o mai bună rezoluţie, un moment şi o viteză mai mari.
Un singur salt al rotorului în majoritatea motoarelor pas cu pas utilizate în prezent se află în intervalul cuprins între 0,72 şi 3,6°.
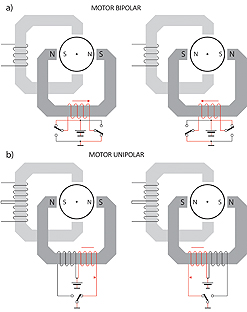
În funcţie de configuraţia înfăşurărilor motoarelor pas cu pas, acestea se împart în bipolare şi unipolare. În motorul bipolar, sunt prezente două bobine, separate între ele, care revin câte unei faze de lucru, iar motorul unipolar are o singură bobină cu priză în mijloc. Sunt întâlnite şi motoare având câte două bobine pe fază şi care pot fi configurate ca unipolare sau ca bipolare. Principiul de funcţionare al ambelor tipuri de motoare pas cu pas este prezentat, în varianta simplificată, în figura 1. După cum se vede, comanda motorului bipolar este mai complicată, deoarece trebuie asigurată modificarea direcţiei de trecere a curentului prin întreaga bobină, iar acest lucru face necesară utilizarea unui comutator dublu (realizat, cel mai adesea, ca punte de tranzistoare). În fiecare fază de funcţionare, curentul trece prin întreaga înfăşurare. În motorul unipolar, pentru comandare este suficient un singur comutator. Din păcate, ca urmare a acestei simplificări, curentul trece doar printr-o jumătate a înfăşurării în fiecare fază de funcţionare, ceea ce determină crearea unui moment mai mic.
Chiar dacă comanda motoarelor pas cu pas este destul de incomodă, aceasta constând în aplicarea secvenţială a unor impulsuri modelate în mod corespunzător, aceste motoare sunt utilizate în multe echipamente. Ele se dovedesc de neînlocuit acolo unde este necesar un control de mare precizie al mişcării. Unul dintre cele mai importante avantaje ale acestui tip de maşini îl reprezintă menţinerea momentului de rotaţie complet în fiecare ciclu de lucru.
Totodată, cu o unitate de control construită în mod corespunzător (de numărare a impulsurilor), poziţia rotorului este întotdeauna cunoscută şi nu sunt necesare sisteme complicate pentru determinarea acesteia. Inconvenientul motoarelor pas cu pas constă în dificultatea de obţinere a unor mari viteze de rotaţie, fapt care rezultă, în primul rând, din metoda de alimentare în comutaţie.
De asemenea, trebuie avută în vedere scăderea destul de rapidă a momentului de rotaţie al motorului pas cu pas în funcţie de viteză. În aplicaţiile în care acest lucru poate fi important, trebuie avută în vedere posibilitatea de utilizare a unor servomecanisme în locul motoarelor pas cu pas. Însă unul dintre cele mai mari avantaje ale motoarelor pas cu pas îl reprezintă rezistenţa crescută a acestor elemente, care rezultă din absenţa periilor care, ca elemente de frecare, sunt supuse unei distrugeri foarte rapide.
Oferta TME
Oferta TME cuprinde o gamă largă de motoare pas cu pas unipolare şi bipolare, cu diverşi parametri electrici şi mecanici, fapt care se reflectă şi în preţ. În prima grupă: 39BYGH sunt prezente două modele marcate cu simbolurile 402B şi 405B.
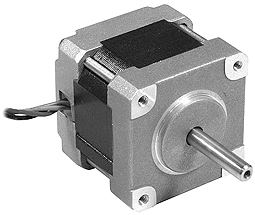
Sunt motoare bipolare mici bifazate (figura 2) care, chiar şi la nişte dimensiuni reduse (39×39×34 mm fără ax) sunt caracterizate de un moment de rotaţie relativ crescut. Cei mai importanţi parametri ai acestor motoare sunt prezentaţi în tabelul 1. Înfăşurările au ca terminaţii, conductoare cu lungimea de 30cm. Unităţile de control recomandate pentru aceste motoare sunt: SMC50 şi SMC81.
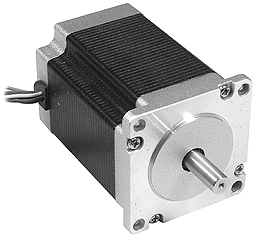
A doua grupă de motoare pas cu pas o reprezintă motoarele hibrid bifazate din seria 57BYGH, din care face parte motorul bipolar 57BYGH804 şi cel unipolar 57BYGH861 (figura 3).
Pentru creşterea momentului de rotaţie s-a aplicat în ele o intervenţie constând în creşterea diametrului rotorului faţă de soluţiile standard. Motoarele 57BYGH sunt incluse în categoria echipamentelor medii.
Cei mai importanţi parametri ai acestora sunt prezentaţi în tabelul 2. Unităţile de control recomandate sunt: SMC62, SMC64, SMC116, SMC108, SIC184, SQCA244 şi SMC139, atunci când este necesară obţinerea unei dinamici mari. Aceste motoare sunt utilizate în maşinile-unelte CNC, plottere, transportatoare etc. Pot funcţiona în domeniul de temperatură 0…40°C, au clasa de izolaţie B.
Cea mai numeroasă grupă de produse o reprezintă motoarele bipolare bifazate din seria 103H produse de SANYO DENKI. Dintre acestea fac parte modele cu diferite mărimi: 42, 56, 60, 86 şi 106mm, caracterizate de un pas de 1,8°.
Sunt motoare utilizate în aplicaţii de automatică necesitând o poziţionare de precizie a elementelor, în maşini-unelte CNC etc.
Cel mai puternic model disponibil în oferta TME are un moment nominal de până la 19 Nm.
Motoarele pas cu pas şi-au găsit utilizarea în multe echipamente electromecanice, de la ceasuri de mână analogice cu control digital, contoare auto, mici motoare de comandă a actuatoarelor în unităţile de hard disc, CD-ROM, imprimante şi plottere, până la maşini-unelte mari CNC. Creşterea momentului de rotaţie al unui anumit model de motor pas cu pas este posibilă prin utilizarea unui angrenaj planetar ales în mod corespunzător.
Acesta este montat direct pe motorul pas cu pas. Foarte importantă pentru atingerea parametrilor de funcţionare ai motorului descrişi în datele de catalog este utilizarea unor unităţi de control corect alese, care să garanteze alimentarea motorului cu tensiunea necesară şi care să asigure randamentul de curent corespunzător.
Realizând o comandă corectă a motoarelor pas cu pas (micropaşi), se poate obţine o poziţionare foarte precisă a rotoarelor, cu o rezoluţie de ordinul fracţiunilor de grade unghiulare.
Mai multe informaţii:
Transfer Multisort Elektronik s.r.l.
Str. B.P. Haşdeu nr. 8, Timişoara
Tel.: +40 356467401
Fax: +40 356467400
tme@tme.ro
www.tme.ro