

Prima dată am transformat o maşină în operare pur electrică în 1999 şi după câteva îmbunătăţiri, în special în ceea ce priveşte pachetul de baterii, maşina a fost un succes moderat. Eram capabil de a parcurge aproximativ 50 de mile la o încărcare şi considerabil mai mult dacă se acorda mai multă atenţie. Maşina a terminat cursele din 2005 şi 2006 pentru vehicule electrice (EV) dintre Londra şi Brighton.
Din nefericire, călcâiul lui Ahile al EV este încă pachetul de baterii. Cu ajutorul unor baterii cu acid uzuale, ieftine, deplasarea este puternic limitată, iar cursele lungi trebuie planificate ca o campanie militară. Trebuie să existe un punct de încărcare la fiecare 50 de mile, unde maşina se va opri câteva ore pentru aceasta operaţiune. În 2005 am început să acord atenţie maşinilor hibride disponibile şi în particular pentru Toyota Prius. Caracteristica interesantă a lui Prius era că putea funcţiona pentru o perioadă limitată ca un EV, cu un pachet de baterii NiMh, motorul electric putând deplasa maşina aproape o milă la mai puţin de 31mph. Am dorit să reduc consumul de carburant al lui Prius de la 60mpg la 100mpg, o economie masivă, prin adăugarea unui pachet mare Li-Ion. Articolul de faţă prezintă atingerea acestui scop prin utilizarea E-blocks şi Flowcode ca sistem de control.
Modul de lucru
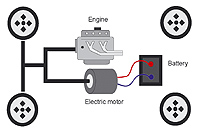
Figura 1 prezintă modul de lucru al Toyotei Prius: în esenţă este o maşină normală ce are suplimentar un motor/generator electric pe calea de comandă. Atunci când şoferul doreşte să încetinească, pedala de frână pune motorul în modul de generator care încarcă bateriile. Dimpotrivă, la viteze mici motorul este utilizat împreună cu motorul cu benzină, ceea ce scade consumul de carburant.
Atunci când am început acest proiect, câteva echipe din USA experimentau utilizarea unor pachete suplimentare de baterii pentru creşterea deplasamentului lui Prius. Toyota, în cele mai moderne maşini, dispune de un sistem de control electronic foarte complex. Partea care are legătură cu conducerea şi managementul bateriilor utilizează o magistrală CAN. Printre altele, operarea conducerii se bazează pe SOC (State Of Charge – starea de încărcare) a pachetului de baterii. Dacă SOC este redusă, sistemul de management va reîncărca bateriile la coborârea unui deal, la frânare sau prin utilizarea oricărui surplus de energie de la motor. Dacă SOC este mare, atunci pachetul de baterii va fi utilizat să conducă maşina la viteze mici sau să asigure un supliment motorului la urcarea unui deal sau în depăşire. Practic SOC este în permanenţă dependent de trafic şi de modul de conducere.
Am identificat două probleme principale la adăugarea unui pachet mai mare de baterii în paralel cu bateriile existente. Prima a fost: care va fi reacţia sistemului de management al maşinii Toyota dacă, din senin, bateria existentă începe să se încarce dintr-o sursă externă – bateria a doua? A doua problemă era: cum să fie controlată această sursă externă de reîncărcare?
Sistemul de control necesar trebuia să asigure că SOC al bateriilor existente să poată fi manipulat, astfel încât sistemul de management al maşinii să vadă un SOC mare şi să utilizeze ori de câte ori este posibil bateriile în locul motorului.
Prima problemă era simplă. Am conectat încărcătorul meu EV la pachetul de baterii al Toyotei şi l-am încărcat. SOC a crescut la aproape complet încărcat (aproape 80% SOC). Managerul bateriilor a ţinut cont de temperatura pachetului şi de tensiune şi a determinat în mod fericit valoarea SOC. Aşadar rezolvarea celei de a doua probleme – transferarea energiei către bateria maşinii Toyota – era problema principală.
Detalii ale circuitului
Am fost suficient de norocos să achiziţionez un set de 56 baterii Li-Ion Thunder Sky pe care le-am putut utiliza ca a doua baterie. Ele erau conectate în serie pentru a oferi o tensiune de curent continuu rezultantă de aproximativ 210V şi mai mult de 50Ah. Bateriile NiMh ale maşinii produc aproximativ 240V DC astfel încât ştiam că am nevoie de un invertor pentru a permite bateriilor adiţionale să le încarce pe cele ale maşinii Toyota. Suplimentar, vroiam să pot încărca peste noapte bateriile Li-Ion, aşa că aveam nevoie de un circuit de reîncărcare. Aveam nevoie de asemenea de un circuit pentru controlul încărcării bateriilor maşinii. Se poate observa circuitul în figura 2.
Sistemul de conectare al pachetului suplimentar de baterii la cel existent a fost realizat prin utilizarea a patru contactoare de putere single pole şi a unui convertor de înaltă putere dc/dc. Convertorul DC-DC este de fapt un încărcător de baterii ce dispune de o punte de rectificare ca primă componentă de convertire a intrării normale AC în DC. Convertorul on-board DC-DC este utilizat la încărcarea bateriilor Li-Ion dacă este nevoie, dar aceasta este altă poveste.
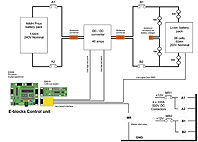
Convertorul are o ieşire cu două nivele selectabile. În nivelul superior, convertorul va încerca să ridice pachetul de baterii existent la o tensiune înaltă şi astfel având un SOC mare. În nivelul inferior, această tensiune a fost joasă şi a permis pachetului de baterii existent să se descarce, ducând la scăderea SOC. Ieşirea din convertorul DC-DC este controlată prin comutarea într-una din cele două seturi de puncte. Când bateria este încărcată peste noapte, ea este izolată de circuitul maşinii Toyota printr-un al doilea set de puncte. Contactoarele dintre bateriile NiMh şi Li-ion vor fi sub tensiune tot timpul de funcţionare al vehiculului, până când bateriile suplimentare sunt complet descărcate şi nu mai pot fi de folos – în acest moment bateriile sunt deconectate. Controlul acestui sistem înseamnă pătrunderea în sistemul de magistrală CAN al maşinii Toyota. Maşina dispune de numeroase dispozitive pe magistrala CAN şi din fericire toate îşi trimit datele în magistrală. Dispozitivele solicită date şi reacţionează în acord cu acestea. Din câte ştiu nici un dispozitiv nu solicită informaţii de la alt dispozitiv. Ceea ce a fost necesar era un dispozitiv de magistrală CAN care putea citi parametrii din sistem şi porni încărcarea pachetului de baterii existent la momentul potrivit.
de Jim Fell
Continuare în numărul viitor