

INTRODUCERE
Microchip continuă să ofere produse inovative din ce în ce mai mici, mai rapide, mai uşoare, mai simplu de utilizat şi mai sigure. Microcontrolerele (MCU) PICmicro® ce au la bază memorie Flash, sunt utilizate într-o gamă foarte largă de produse de uz curent, de la detectoare de fum, la produse industriale, auto şi medicale. Familia de dispozitive PIC12F/16F ce dispune de comparatoare de tensiune on-chip îmbină toate avantajele arhitecturii MCU PICmicro şi flexibilitatea memoriei program Flash cu natura de semnal mixt a comparatorului de tensiune. Împreună, acestea formează din punct de vedere constructiv un bloc economic, hibrid digital/analog, cu puterea şi flexibilitatea de a lucra în lumea analogică. Flexibilitatea dată de Flash şi excelenta suită de unelte de dezvoltare, care include depanatorul în circuit In-Circuit Debugger, programare serială în circuit (ICSP™) şi MPLAB® ICE 2000, fac ca aceste dispozitive să fie ideale pentru aproape orice aplicaţie de control embedded. Următoarea serie de sfaturi pot fi asociate unei varietăţi mari de aplicaţii ce utilizează comparatoare discrete de tensiune sau microcontrolere cu comparatoare de tensiune integrate.
TIP #1 Realizarea unui amplificator operaţional dintr-un comparator
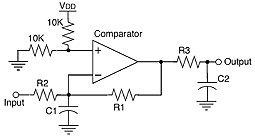
Atunci când se realizează interfaţarea cu un senzor, sunt necesari câţiva factori de amplificare tipici pentru a adapta întreaga plajă de ieşire a senzorului cu întreaga plajă a unui convertor ADC. Uzual, această operaţiune este realizată cu ajutorul unui amplificator operaţional, cu toate că, în aplicaţiile sensibile la preţ, o componentă activă suplimentară poate conduce la depăşirea bugetului. Aplicaţia de faţă prezintă modul prin care un comparator on-chip poate fi utilizat ca şi un etaj de amplificare cu amplificator operaţional pentru semnale senzoriale lente. Sunt prezentate topologiile inversoare şi ne-inversoare în Figura 1-1 şi Figura 1-2.
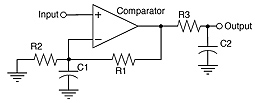
Pentru proiectarea unui amplificator ne-inversor, se vor alege rezistenţele R1 şi R2 prin utilizarea expresiei factorului de amplificare (Gain) a unui amplificator ne-inversor(Ecuaţia 1-1)

Odată ce factorul de amplificare este cunoscut, se pot determina valorile pentru R3 şi C2. R3 şi C2 formează un filtru trece jos pe ieşirea amplificatorului. Frecvenţa de prag a filtrului trece jos trebuie să fie de 2 până la 3 ori mai mare decât frecvenţa maximă a semnalului de amplificat, cu scopul prevenirii atenuării semnalului, iar R3 trebuie păstrată la valoare redusă pentru a minimiza impedanţa de ieşire a amplificatorului. Ecuaţia 1-2 prezintă relaţia dintre R3, C2 şi frecvenţa de prag (FCORNER) a filtrului trece jos.
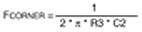
Prin utilizarea Ecuaţiei 1-3 se poate determina o valoare pentru C1. Frecvenţa de prag trebuie sa fie aceeaşi ca în cazul ecuaţiei anterioare.

Pentru proiectarea unui amplificator inversor trebuie alese valorile rezistenţelor R1 şi R2 cu ajutorul expresiei amplificării (Gain) unui amplificator inversor cu amplificator operaţional (Ecuaţia 1-4).

Apoi trebuie alese valorile pentru divizorul de tensiune format din R4 şi R5. În final se aleg valorile pentru C1 şi C2 după cum a fost arătat în cazul amplificatorului ne-inversor.
Exemplu:
• Pentru C2 se va stabili frecvenţa de prag F
• Factor de amplificare (Gain) = 6,156; R1 = R3 = 19,8kΩ
• R2 = 3,84kΩ, C1 = 0,047 µF, FCORNER = 171 Hz
• C2 = 0,22 µF
TIP #2 Driver PWM pentru curenţi mari
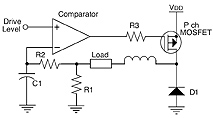
Acest paragraf prezintă combinarea dintre un comparator cu un tranzistor MOSFET şi un inductor cu scopul creării unui circuit de comandă în comutaţie pentru curenţi mari (Figura 2-1).
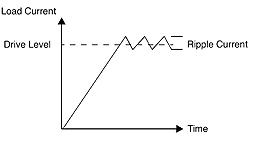
Operarea circuitului începe cu MOSFET-ul în stare oprit şi nici un curent nu străbate inductorul şi sarcina. Cu tensiunea de sens pe R1 egală cu zero şi tensiunea DC prezentă la nivelul intrării circuitului, ieşirea comparatorului trece în nivel logic inferior. Această ieşire porneşte MOSFET-ul, iar prin MOSFET, inductor, sarcină şi R1 va începe să crească curentul.
Când curentul creşte suficient de mult pentru a genera o tensiune pe R1 egală cu nivelul driver-ului, ieşirea comparatorului trece în nivel superior, oprind MOSFET-ul. Tensiunea la nivelul joncţiunii dintre MOSFET şi inductor, cade până D1 este polarizată direct. Curentul scade în continuu de la valoarea de vârf avută, către zero. Când tensiunea prin rezistorul de sens R1 cade sub nivelul driver-ului, ieşirea comparatorului trece în nivel inferior, MOSFET-ul porneşte din nou, iar ciclul se reia. R2 şi C1 formează o reţea de întârziere care limitează viteza de comutaţie a circuitului şi provoacă o uşoară depăşire sau neatingere a nivelului driver-ului în timpul operării. Limitarea este necesară pentru păstrarea unei viteze de comutare reduse, astfel încât MOSFET-ul să comute eficient. Dacă R2 şi C1 nu sunt prezente, sistemul va funcţiona la viteza stabilită de întârzierea de propagare dată de comparator şi de viteza de comutaţie a MOSFET-ului. La aceasta viteză, durata de comutaţie a MOSFET-ului va reprezenta o parte semnificativă a duratei de comutaţie generale, eficienţa de comutaţie a MOSFET-ului fiind redusă.
Pentru proiectarea unui driver PWM de curent înalt, prima dată trebuie determinată frecvenţa de comutaţie (FSWX) potrivită pentru sistem. În continuare trebuie ales un MOSFET şi D1 capabile de a gestiona cerinţele legate de curentul pe sarcină. Apoi se stabilesc valorile pentru R2 şi C1 cu ajutorul Ecuaţiei 2-1.

În continuare se determină oscilaţia maximă a curentului (ripple current) pe care sarcina o poate tolera, şi se calculează valoarea necesară a inductanţei L1 cu ajutorul Ecuaţiei 2-2.

În cele din urmă se va alege valoarea rezistenţei R1 pentru care se va produce ca reacţie o oscilaţie de tensiune de 100 mV pentru o oscilaţie maximă de curent IRIPPLE.
Exemplu:
• FSWX = 10 kHz, R2 = 22kΩ, C1 = 0,01 µF
• IRIPPLE = 100 mA, VDD = 12V, VL = 3,5V
• L = 4,25mH
TIP #3 Convertor A/D Delta Sigma
Acest paragraf descrie crearea unui convertor A/D delta sigma hardware/software. Un astfel de dispozitiv are la bază un modulator delta sigma compus dintr-un integrator, un comparator, un ceas şi o ieşire de convertor D/A pe 1-bit.
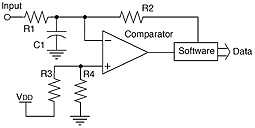
În acest exemplu circuitul integrator este realizat din R1 şi C1. Comparatorul este un comparator de tensiune on-chip. Ceasul este implementat în software şi ieşirea D/A pe 1 bit este un singur pin de intrare/ieşire. Ieşirea conversiei D/A este adusă înapoi în integrator prin rezistenţa R2. Rezistenţele R3 şi R4 formează o tensiune VDD/2 ca referinţă pentru circuit (Figura 3-1).
În timpul operării, ieşirea de reacţie din software este o copie eşantionată a ieşirii comparatorului. La operarea normală, ieşirea modulatorului generează un semnal PWM invers proporţional cu tensiunea de intrare. Odată cu creşterea tensiunii de intrare, factorul de umplere al semnalului PWM va scădea pentru compensare. Dacă intrarea scade, factorul de umplere creşte.
Pentru realizarea unei conversii A/D, factorul de umplere trebuie integrat în timp, digital, pentru obţinerea unei valori binare. Software-ul porneşte două numărătoare. Primul determină numărul total de eşantioane în conversie, iar al doilea determină numărul de eşantioane care sunt în stare logică 0. Raportul dintre cele două valori determinate este egal cu raportul dintre tensiunea de intrare şi VDD.
Notă: acest lucru se întâmplă în condiţiile în care R1 şi R2 sunt egale, iar R3 este egală cu R4. Dacă R1 şi R2 nu sunt egale, atunci tensiunea de intrare este scalată cu raportul R2/R1, dar în continuare R3 trebuie să fie egală cu R4.
Exemplu:
• R3 = R4 = 10 kHz
• R1 = R2 = 5,1kΩ
• C1 = 1000 pF
TIP #4 Comutator de nivel logic
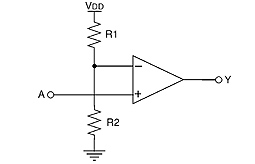
În cadrul acestui ultim paragraf este prezentată utilizarea comparatorului ca şi comutator digital de nivel logic. Intrarea inversoare este polarizată faţă de mijlocul plajei de tensiune de intrare (VIN/2). Intrarea ne-inversoare este utilizată ca intrare a circuitului. Când intrarea este sub pragul VIN/2, ieşirea este în stare logică zero. Când intrarea este peste pragul de tensiune VIN/2, ieşirea se va afla în stare logică 1. Valorile pentru R1 şi R2 nu sunt critice, dar din raportul lor trebuie să rezulte pragul VIN/2 la jumătatea plajei tensiunii semnalului de intrare. Unele microcontrolere au opţiunea de conectare a intrării inversoare la o referinţă internă de tensiune.
Pentru utilizarea acestei referinţe în locul R1 şi R2, se selectează şi configurează referinţa internă pentru o jumătate din domeniul tensiunii de intrare.
Notă: Întârzierea de propagare tipică pentru circuit este de 250-350 ns la utilizarea unui comparator on-chip tipic ca periferic al unui microcontroler.
Exemplu:
• VIN = 0 – 2V, VIN/2 = 1V, VDD = 5V
• R2 = 10kΩ, R3 = 3,9kΩ